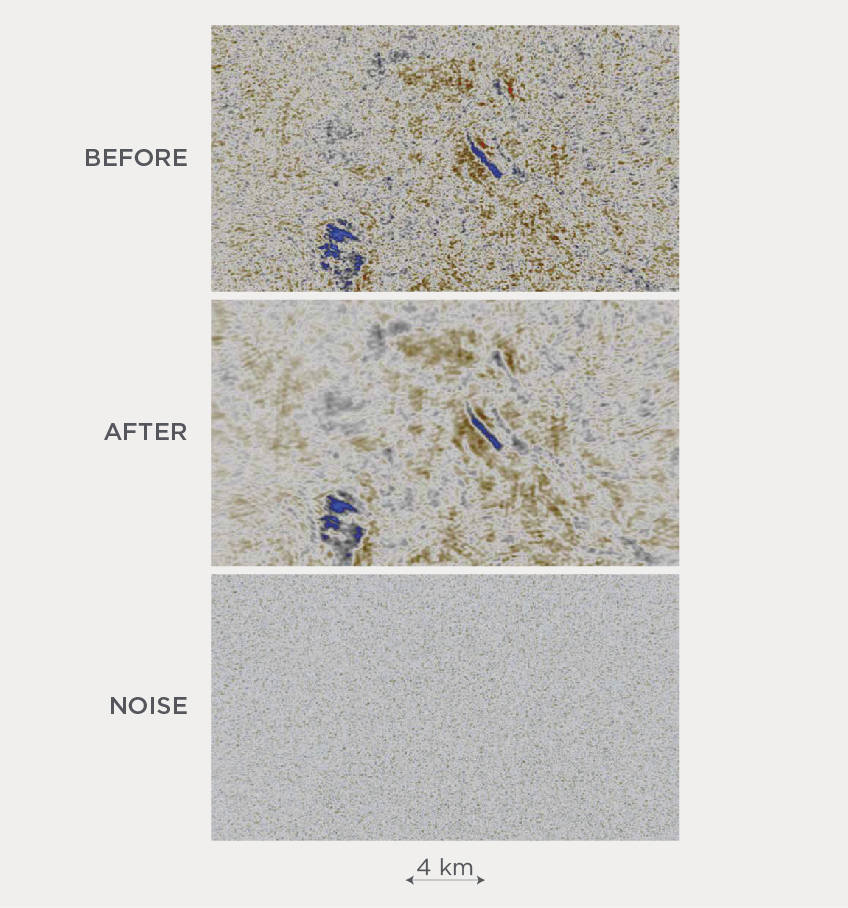
(top) Difference timeslice (baseline – monitor) before time-lapse co-denoise. (middle) Difference timeslice after time-lapse co-denoise. (bottom) Difference between the top and middle images highlighting the removed noise. Our algorithm describes a model such that baseline and monitor share a “common signal” while each contains a unique “innovation signal”. The data misfit not explained by this model is treated as noise. The signal components are simultaneously recovered using an inversion algorithm. (Data courtesy of Equinor qualification project)
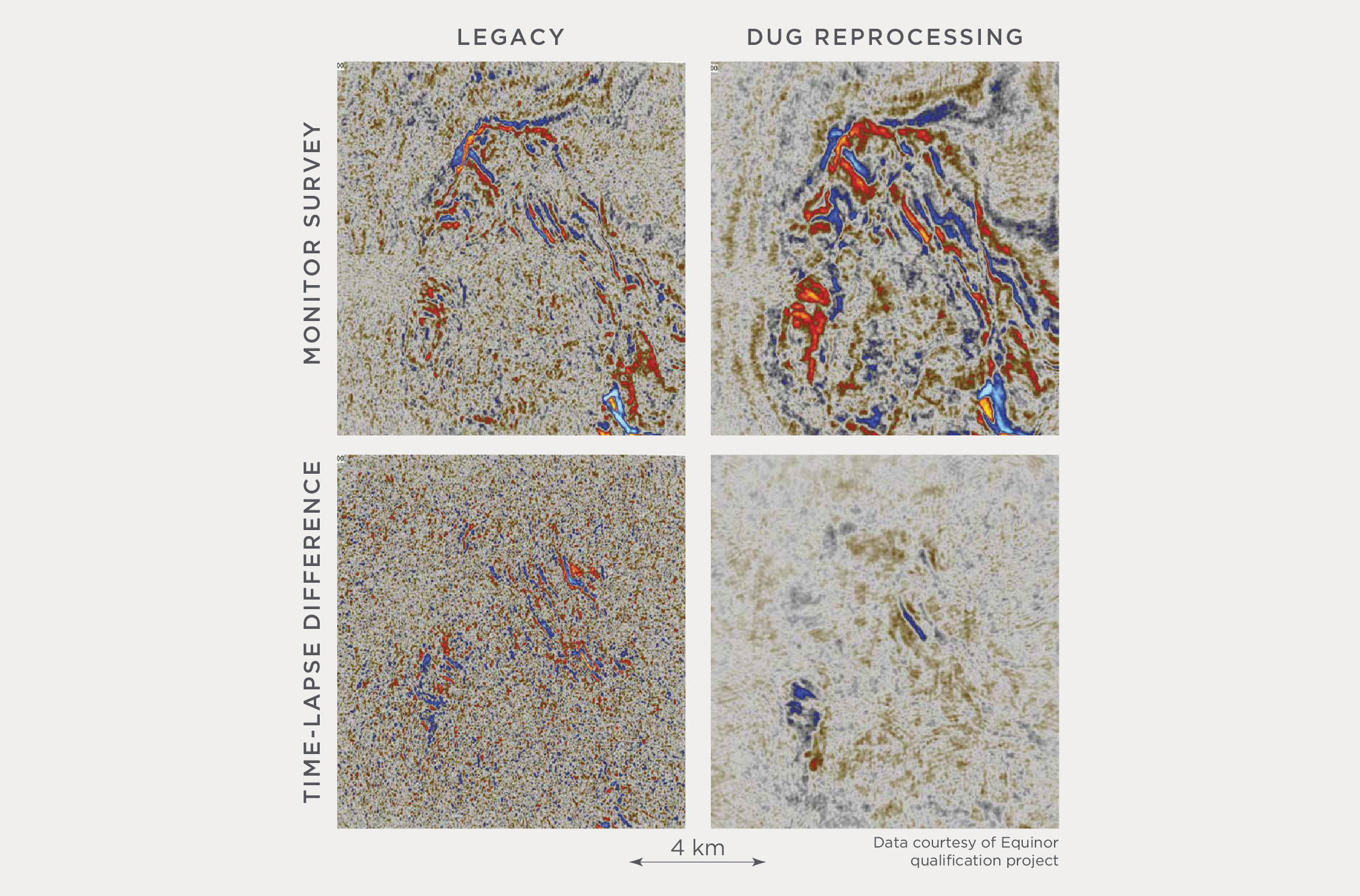
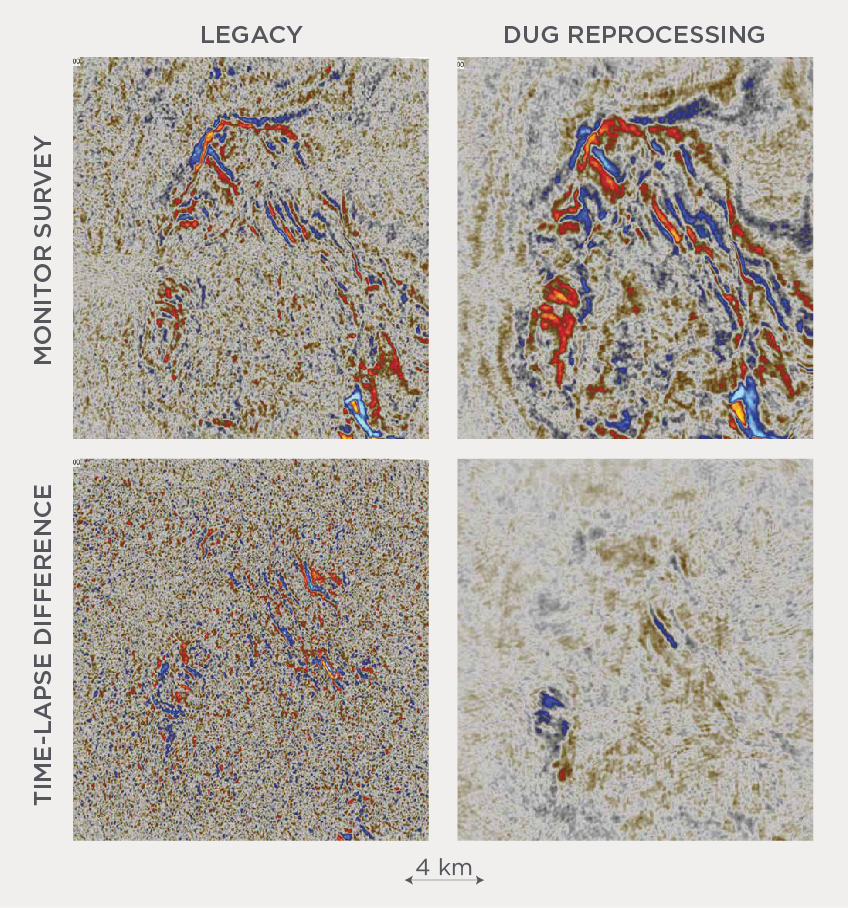
(left column) Legacy processing results showing a full-stack time slice through a monitor survey (top) and a difference (baseline – monitor) time slice (bottom). (right column) Our time-lapse reprocessing results highlight much improved signal-to-noise ratio and clearer imaging of the time-lapse signals. (Data courtesy of Equinor qualification project)
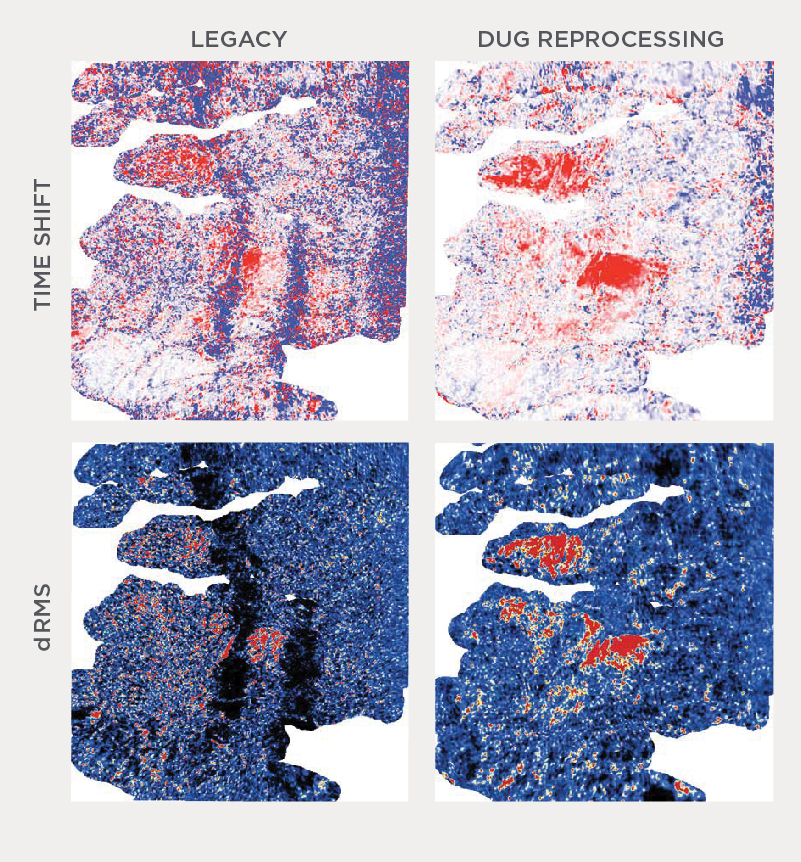
(left column) Legacy processing results showing time shift and dRMS attributes for a target horizon. (right column) The same attributes after our time-lapse reprocessing. Note the improved resolution and definition of the time-lapse response. (Data courtesy of Equinor qualification project)

